Robot Achieves Tennis Proficiency with Minimal Training Data
The world of robotics continues to push boundaries and a recent breakthrough demonstrates a remarkable leap in artificial intelligence and motor skill learning. Researchers have developed a system that enabled a humanoid robot to play tennis – and ultimately defeat its human instructor – after being trained on just five hours of imperfect human movement data. This achievement, detailed in a paper published on arXiv and showcased with a Unitree G1 humanoid robot, signifies a potential paradigm shift in how robots learn complex physical tasks, moving away from the require for meticulously curated datasets and towards a more adaptable, human-like learning process.
The project, dubbed LATENT – which stands for Learning Athletic humanoid TEnnis skills from imperfect human motioN daTa – was a collaborative effort between Tsinghua University in China and Galbot Inc. The core innovation lies in the system’s ability to learn from fragmented, less-than-perfect human tennis motions, rather than requiring pristine, professional-grade data. This approach dramatically reduces the cost and time associated with robotic training, opening doors to more accessible and versatile robotic applications. The implications extend far beyond the tennis court, potentially impacting fields like manufacturing, healthcare, and disaster response, where robots need to adapt to unpredictable environments and perform complex maneuvers.
Learning from Imperfection: The LATENT System
Traditional robotic training often relies on meticulously curated datasets, which are expensive and time-consuming to create. LATENT circumvents this limitation by focusing on “primitive skills” – the fundamental movements that comprise a tennis swing, such as forehands, backhands, and footwork. The system learns a “latent action space” from these fragmented motions, essentially building a library of basic actions. A high-level AI policy then acts as a “digital coach,” correcting and combining these flawed skills to successfully return a ball over the net. This approach mirrors how humans learn – by observing and refining basic movements rather than attempting to perfectly replicate complex actions from the outset.
According to Zhikai Zhang, the lead author of the research paper published on arXiv, the learning curve was initially steep. “On the first day of real-world deployment, the robot couldn’t return a single ball I served,” Zhang stated. “By the last day of the project, I could no longer beat it.” This dramatic improvement highlights the effectiveness of the LATENT system and its ability to rapidly adapt to a dynamic environment. The team has made the project details and code publicly available on GitHub, fostering open-source collaboration and further development in the field.
Sim-to-Real Transfer and the Unitree G1 Robot
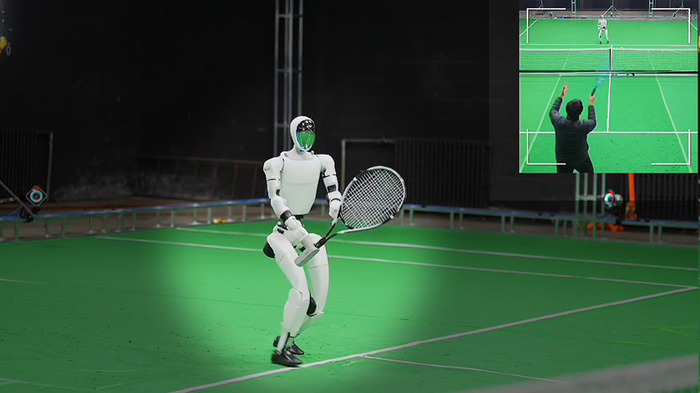
A crucial component of the LATENT system is its reliance on “sim-to-real transfer.” The entire learning process is initially honed in a simulated environment using MuJoCo, a physics engine commonly used in robotics research. This allows the researchers to test and refine the AI policy without the risks and costs associated with real-world experimentation. Once the policy is sufficiently developed in simulation, it is then deployed onto a physical robot – in this case, the Unitree G1 humanoid robot. The Unitree G1, known for its agility and dynamic movement capabilities, proved to be an ideal platform for demonstrating the effectiveness of the LATENT system. The robot was able to consistently strike incoming balls under a wide range of conditions and return them to target locations, whereas maintaining natural-looking motion styles.
The research team reported that the robot achieved a success rate of approximately 90% in returning balls traveling at speeds exceeding 15 meters per second. This level of performance is particularly impressive considering the limited amount of training data used – just five hours of basic movement capture. The success of the project demonstrates the potential of learning from imperfect data, a significant advancement in the field of robotics. The ability to learn from readily available, less-than-perfect data sources could dramatically accelerate the development and deployment of robots in a wide range of applications.
Beyond Tennis: Implications for the Future of Robotics
While the LATENT system was specifically designed for tennis, the underlying principles have far-reaching implications for the broader field of robotics. The ability to learn from imperfect data is a critical step towards creating robots that can operate effectively in real-world environments, which are inherently messy and unpredictable. This approach could be applied to a wide range of tasks, from manufacturing and logistics to healthcare and disaster relief. Imagine robots learning to assemble complex products from incomplete instructions, assisting surgeons with intricate procedures based on limited demonstrations, or navigating disaster zones by adapting to unforeseen obstacles.
The development of LATENT also highlights the growing importance of AI-powered coaching and correction in robotic learning. The “digital coach” component of the system plays a crucial role in refining the robot’s movements and improving its performance. This approach could be extended to other areas of robotic learning, allowing robots to continuously improve their skills through self-correction and feedback. The open-source nature of the project encourages collaboration and innovation, accelerating the pace of development in the field. The availability of the code and data on GitHub allows researchers around the world to build upon the work of the Tsinghua University and Galbot Inc. Team, potentially leading to even more groundbreaking advancements in the years to come.
Key Takeaways
- The LATENT system enables a humanoid robot to learn tennis skills from just five hours of imperfect human movement data.
- The system utilizes a “latent action space” and an AI-powered “digital coach” to learn and refine movements.
- Sim-to-real transfer is a key component of the system, allowing for efficient learning in a simulated environment before deployment on a physical robot.
- The project demonstrates the potential of learning from imperfect data, reducing the cost and time associated with robotic training.
- The open-source nature of the project fosters collaboration and innovation in the field of robotics.
The research team is continuing to refine the LATENT system and explore its potential applications in other domains. Future work will focus on improving the robot’s ability to adapt to different opponents and playing styles, as well as expanding the system’s capabilities to other sports and physical tasks. The team plans to release additional data and code on GitHub in the coming months, further accelerating the development of this promising technology. The next step involves refining the system’s ability to generalize to a wider range of tennis players and court conditions, a challenge that will require further research and development.
What are your thoughts on the future of robotics and AI? Share your comments below, and let’s discuss the potential impact of these technologies on our lives.